--
license: apache-2.0
tags:
- depth
- relative depth
pipeline_tag: depth-estimation
library: transformers
widget:
- inference: false
---
# Depth Anything V2 Small – Transformers Version
Depth Anything V2 is trained from 595K synthetic labeled images and 62M+ real unlabeled images, providing the most capable monocular depth estimation (MDE) model with the following features:
- more fine-grained details than Depth Anything V1
- more robust than Depth Anything V1 and SD-based models (e.g., Marigold, Geowizard)
- more efficient (10x faster) and more lightweight than SD-based models
- impressive fine-tuned performance with our pre-trained models
This model checkpoint is compatible with the transformers library.
Depth Anything V2 was introduced in [the paper of the same name](https://arxiv.org/abs/2406.09414) by Lihe Yang et al. It uses the same architecture as the original Depth Anything release, but uses synthetic data and a larger capacity teacher model to achieve much finer and robust depth predictions. The original Depth Anything model was introduced in the paper [Depth Anything: Unleashing the Power of Large-Scale Unlabeled Data](https://arxiv.org/abs/2401.10891) by Lihe Yang et al., and was first released in [this repository](https://github.com/LiheYoung/Depth-Anything).
[Online demo](https://huggingface.co/spaces/depth-anything/Depth-Anything-V2).
## Model description
Depth Anything V2 leverages the [DPT](https://huggingface.co/docs/transformers/model_doc/dpt) architecture with a [DINOv2](https://huggingface.co/docs/transformers/model_doc/dinov2) backbone.
The model is trained on ~600K synthetic labeled images and ~62 million real unlabeled images, obtaining state-of-the-art results for both relative and absolute depth estimation.
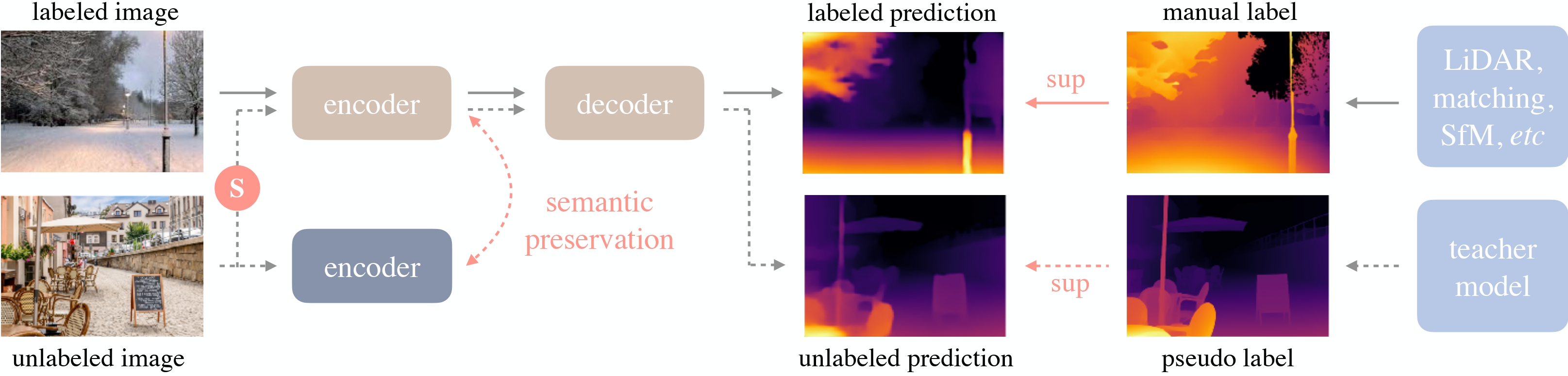 Depth Anything overview. Taken from the original paper.
## Intended uses & limitations
You can use the raw model for tasks like zero-shot depth estimation. See the [model hub](https://huggingface.co/models?search=depth-anything) to look for
other versions on a task that interests you.
### How to use
Here is how to use this model to perform zero-shot depth estimation:
```python
from transformers import pipeline
from PIL import Image
import requests
# load pipe
pipe = pipeline(task="depth-estimation", model="pcuenq/Depth-Anything-V2-Small-hf")
# load image
url = 'http://images.cocodataset.org/val2017/000000039769.jpg'
image = Image.open(requests.get(url, stream=True).raw)
# inference
depth = pipe(image)["depth"]
```
Alternatively, you can use the model and processor classes:
```python
from transformers import AutoImageProcessor, AutoModelForDepthEstimation
import torch
import numpy as np
from PIL import Image
import requests
url = "http://images.cocodataset.org/val2017/000000039769.jpg"
image = Image.open(requests.get(url, stream=True).raw)
image_processor = AutoImageProcessor.from_pretrained("pcuenq/Depth-Anything-V2-Small-hf")
model = AutoModelForDepthEstimation.from_pretrained("pcuenq/Depth-Anything-V2-Small-hf")
# prepare image for the model
inputs = image_processor(images=image, return_tensors="pt")
with torch.no_grad():
outputs = model(**inputs)
predicted_depth = outputs.predicted_depth
# interpolate to original size
prediction = torch.nn.functional.interpolate(
predicted_depth.unsqueeze(1),
size=image.size[::-1],
mode="bicubic",
align_corners=False,
)
```
For more code examples, please refer to the [documentation](https://huggingface.co/transformers/main/model_doc/depth_anything.html#).
### Citation
```bibtex
@misc{yang2024depth,
title={Depth Anything V2},
author={Lihe Yang and Bingyi Kang and Zilong Huang and Zhen Zhao and Xiaogang Xu and Jiashi Feng and Hengshuang Zhao},
year={2024},
eprint={2406.09414},
archivePrefix={arXiv},
primaryClass={id='cs.CV' full_name='Computer Vision and Pattern Recognition' is_active=True alt_name=None in_archive='cs' is_general=False description='Covers image processing, computer vision, pattern recognition, and scene understanding. Roughly includes material in ACM Subject Classes I.2.10, I.4, and I.5.'}
}
```
Depth Anything overview. Taken from the original paper.
## Intended uses & limitations
You can use the raw model for tasks like zero-shot depth estimation. See the [model hub](https://huggingface.co/models?search=depth-anything) to look for
other versions on a task that interests you.
### How to use
Here is how to use this model to perform zero-shot depth estimation:
```python
from transformers import pipeline
from PIL import Image
import requests
# load pipe
pipe = pipeline(task="depth-estimation", model="pcuenq/Depth-Anything-V2-Small-hf")
# load image
url = 'http://images.cocodataset.org/val2017/000000039769.jpg'
image = Image.open(requests.get(url, stream=True).raw)
# inference
depth = pipe(image)["depth"]
```
Alternatively, you can use the model and processor classes:
```python
from transformers import AutoImageProcessor, AutoModelForDepthEstimation
import torch
import numpy as np
from PIL import Image
import requests
url = "http://images.cocodataset.org/val2017/000000039769.jpg"
image = Image.open(requests.get(url, stream=True).raw)
image_processor = AutoImageProcessor.from_pretrained("pcuenq/Depth-Anything-V2-Small-hf")
model = AutoModelForDepthEstimation.from_pretrained("pcuenq/Depth-Anything-V2-Small-hf")
# prepare image for the model
inputs = image_processor(images=image, return_tensors="pt")
with torch.no_grad():
outputs = model(**inputs)
predicted_depth = outputs.predicted_depth
# interpolate to original size
prediction = torch.nn.functional.interpolate(
predicted_depth.unsqueeze(1),
size=image.size[::-1],
mode="bicubic",
align_corners=False,
)
```
For more code examples, please refer to the [documentation](https://huggingface.co/transformers/main/model_doc/depth_anything.html#).
### Citation
```bibtex
@misc{yang2024depth,
title={Depth Anything V2},
author={Lihe Yang and Bingyi Kang and Zilong Huang and Zhen Zhao and Xiaogang Xu and Jiashi Feng and Hengshuang Zhao},
year={2024},
eprint={2406.09414},
archivePrefix={arXiv},
primaryClass={id='cs.CV' full_name='Computer Vision and Pattern Recognition' is_active=True alt_name=None in_archive='cs' is_general=False description='Covers image processing, computer vision, pattern recognition, and scene understanding. Roughly includes material in ACM Subject Classes I.2.10, I.4, and I.5.'}
}
```