Spaces:
Runtime error

Runtime error
| title: PoseDiffusion_MVP | |
| emoji: 🐠 | |
| colorFrom: blue | |
| colorTo: indigo | |
| sdk: gradio | |
| sdk_version: 3.38.0 | |
| app_file: app.py | |
| pinned: false | |
| license: apache-2.0 | |
| # An Out-Of-The-Box Version of PoseDiffusion | |
| [](https://huggingface.co/spaces/chongjie/PoseDiffusion_MVP) | |
| ## Introduction | |
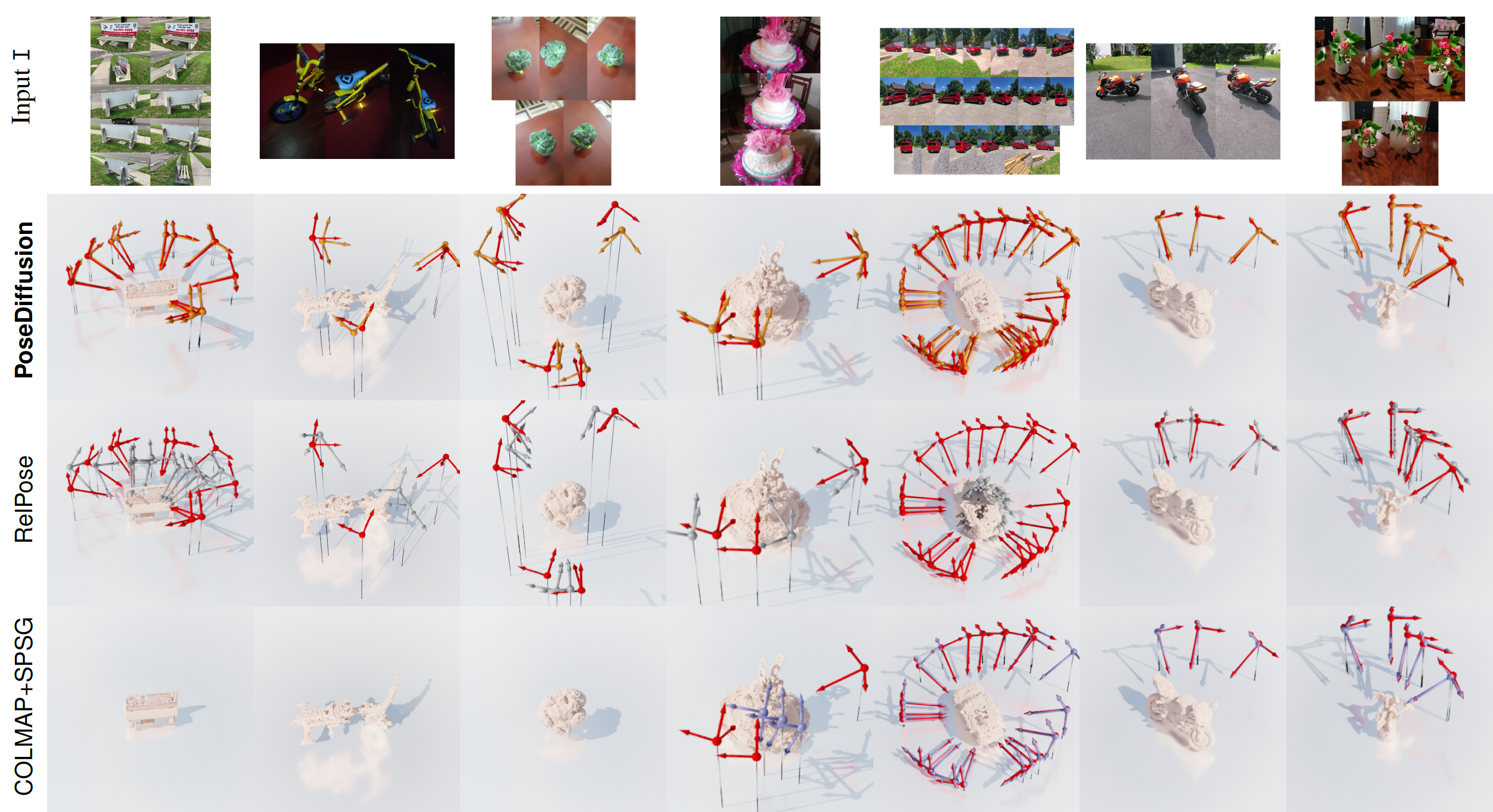
| Camera pose estimation is a critical task in computer vision, traditionally relying on classical methods such as keypoint matching, RANSAC, and bundle adjustment. [PoseDiffusion](https://posediffusion.github.io/) introduces a novel approach to this problem by formulating the Structure from Motion (SfM) problem within a probabilistic diffusion framework. | |
| [](https://posediffusion.github.io/resources/splash_sample2.mp4 "Demo Video") | |
| ## Usage | |
| There are several ways you can use or interact with this project: | |
| * **Direct Use**: If you want to use the space directly without any modifications, simply click [here](https://huggingface.co/spaces/chongjie/PoseDiffusion_MVP). This will take you to the live application where you can interact with it as is. | |
| * **Duplicate the Space**: If you want to create a copy of this space for your own use or modifications, click [here](https://huggingface.co/spaces/chongjie/co-tracker?duplicate=true). This will create a duplicate of the space under your account, which you can then modify as per your needs. | |
| * **Run with Docker**: If you prefer to run the application locally using Docker, you can do so with the following command: | |
| ```bash | |
| docker run -it -p 7860:7860 --platform=linux/amd64 \ | |
| registry.hf.space/chongjie-posediffusion-mvp:latest python app.py | |
| ``` | |
| ## Acknowledgments | |
| This repository is based on original [PoseDiffusion](https://posediffusion.github.io/) |